Using controllers like JoyCon for humanoids is a brilliant callback to the controllers for tradional robots.
最新资讯
- 清华团队发布全解耦绳驱机械臂D3-ARM(文章地址: https://arxiv.org/html/2502.12963v1)
- 智元发布VLM基座模型GO-1与新款人形机器人灵犀X-2(网址: https://agibot-world.cn/blog/go1 ; 机器人演示视频(B站) )
- 协作机器人公司越疆科技发布人形机器人AT,为其首款可直膝行走人形机器人(演示视频: https://www.bilibili.com/video/BV1EkREYbEsg)
- 成都人形机器人创新中心发布基于3DSGs的机器人任务规划推理执行系统Raydiculous-1,实现端上推理(网址: https://sichuan.scol.com.cn/ggxw/202503/82915815.html ,吐槽: 这demo里"自研"机器人一眼抄袭的hello robot的stretch3😅)
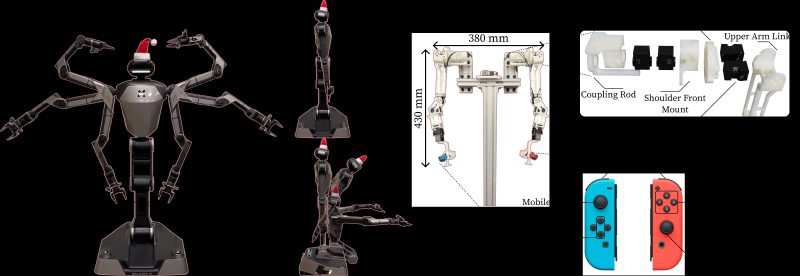
- Stanford团队发布家用任务全身操作框架BRS,推出学习算法WB-VIMA与通用全身遥操作接口JoyLo(项目地址: https://behavior-robot-suite.github.io/, 思考: 本工作所用整机由星海图提供; Lerobot也有类似用Joycon控制机械臂的工作)
- DeepMind团队发布Gemini Robotics/Gemini Robotics ER模型(项目地址: https://deepmind.google/technologies/gemini-robotics/)
- 深圳市印发《深圳市具身智能机器人技术创新与发展行动计划》(通知网址: https://mp.weixin.qq.com/s/Ka2t9gTI0WDNPGfncToapQ)
关注的项目
- 一个开源AI agent对浏览器操作的工具,通过提取交互元素使AI可以执行填写表单、搜索信息等操作(项目地址: https://github.com/browser-use/browser-use, 思考: Manus等项目使用开源工具的风险?学习各个License的限制)
- Seeed Lerobot Hackathon在3月份深圳站的第一名做了一个自动烤串的demo,值得学习(文档地址: https://qvsjevbk56o.feishu.cn/wiki/Yq4iwm1iOiG0mqkPNdscnQ9Wn3b)
- 本末科技发布的模块化组合式轮组机器人TITA(网址: https://directdrive.com/product_TITA, 思考: 来源应该都是ETH的设计,但是这一款模块化做得不错,特别是双机组合这一亮点)
- 哈工大团队与傅利叶开发的开源双足Alexbot,BOM成本约为¥15k-20k(项目地址: https://github.com/Alexhuge1/Alexbot)